


输出反馈鲁棒模型预测控制原理图
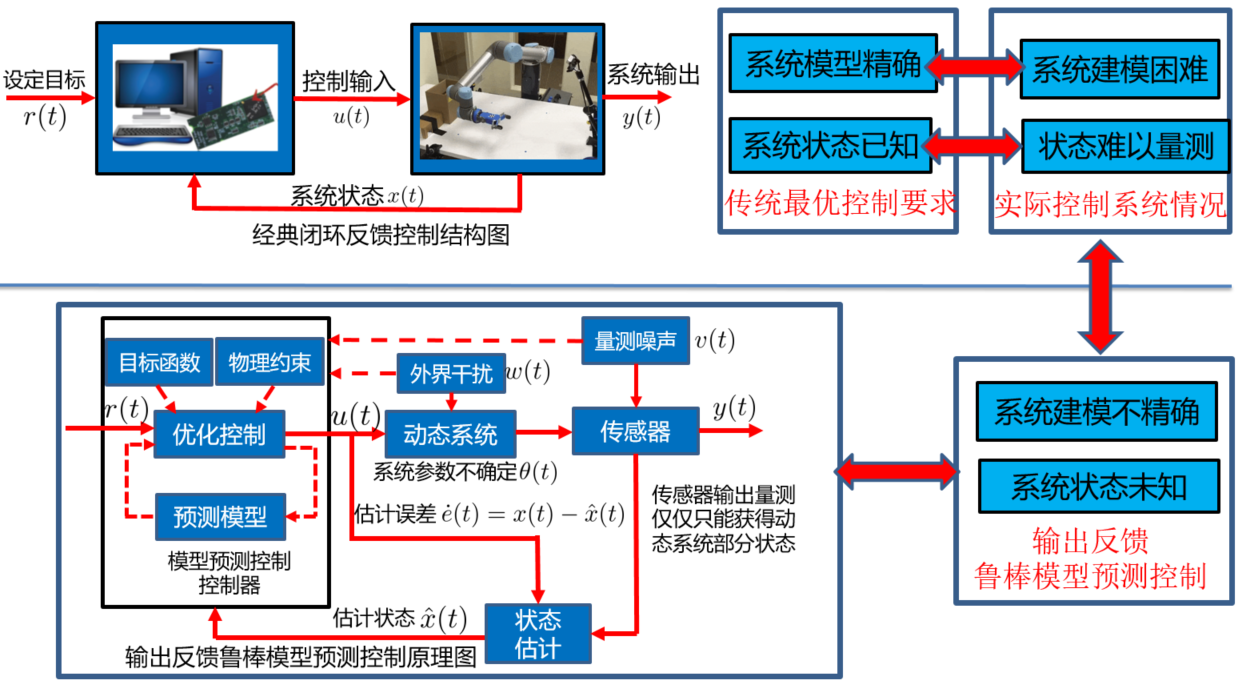
鲁棒估计与控制研究要点

针对不确定系统的输出反馈鲁棒模型预测控制的研究本质上为约束系统的“鲁棒估计与控制”问题,其研究内容是在传统经典控制要求“稳+准+快”的基础上进一步考虑实际系统控制中通常遇到的系统模型不确定、执行器和控制器物理约束、系统内部状态未知、性能指标的最优控制要求。因此相应“鲁棒估计与控制”研究要点包括:在系统不确定时鲁棒稳定性要求、存在物理约束时优化递归可行性要求、状态未知时估计与控制要求、以及最优控制时实时控制要求。针对上述研究要点的综合研究涉及到不确定性系统建模、物理约束处理、观测器/控制器综合设计、控制性能优化、设计鲁棒稳定条件、优化递归可行性、非凸优化求解、降低算法计算量八个方面内容。
基于强化学习的机械臂技能操作

永磁同步电机系统鲁棒模型预测控制
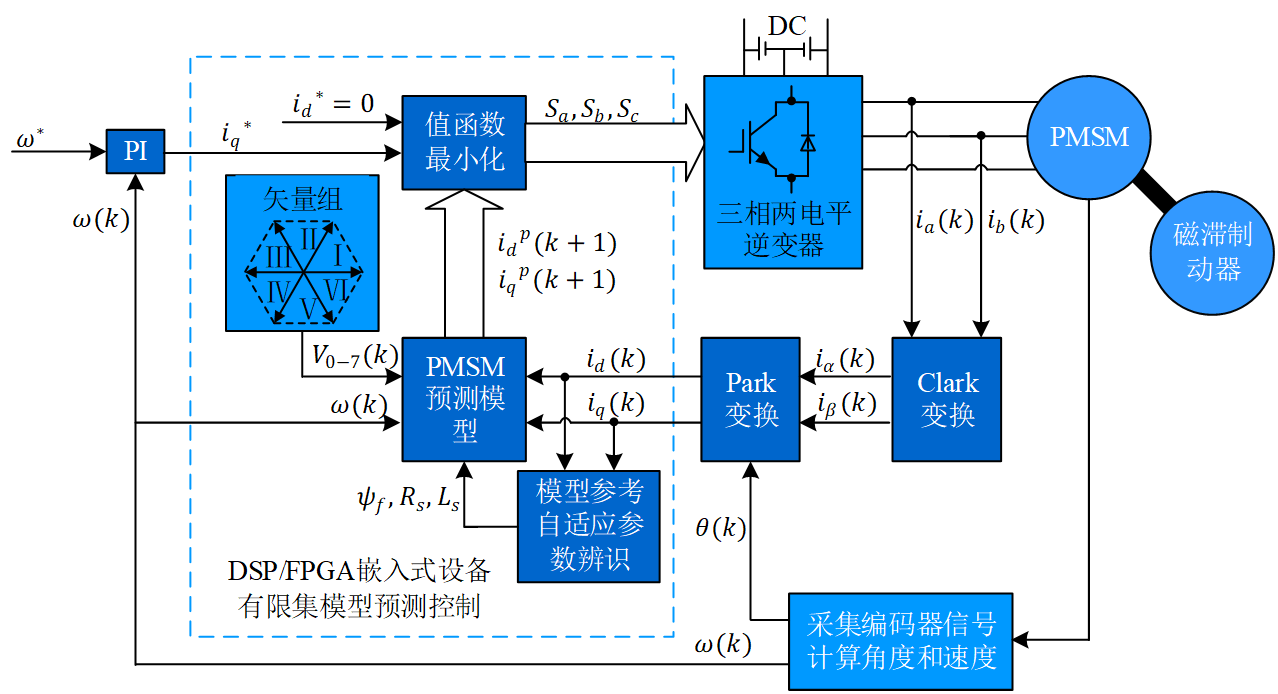
永磁同步电机模型预测控制系统的实验平台主要由控制板、电机驱动板、永磁同步电机和磁滞制动器组成。有限集模型预测控制通过利用系统的预测模型,计算在当前控制输入作用下每一个开关状态所对应的逆变器输出值,最终选择价值函数最小的开关状态组合,使逆变器输出最优的电压矢量,从而有效地提高控制系统的动态响应能力和稳态性能。永磁同步电机在运行过程中会出现电机参数变化导致系统控制性能下降的问题。通过采用模型参考自适应方法在线辨识永磁同步电机的电阻、电感和磁链值,实时更新电机参数,从而满足模型预测控制系统鲁棒性,以及控制性能最优性。
空间可展开天线振动抑制控制
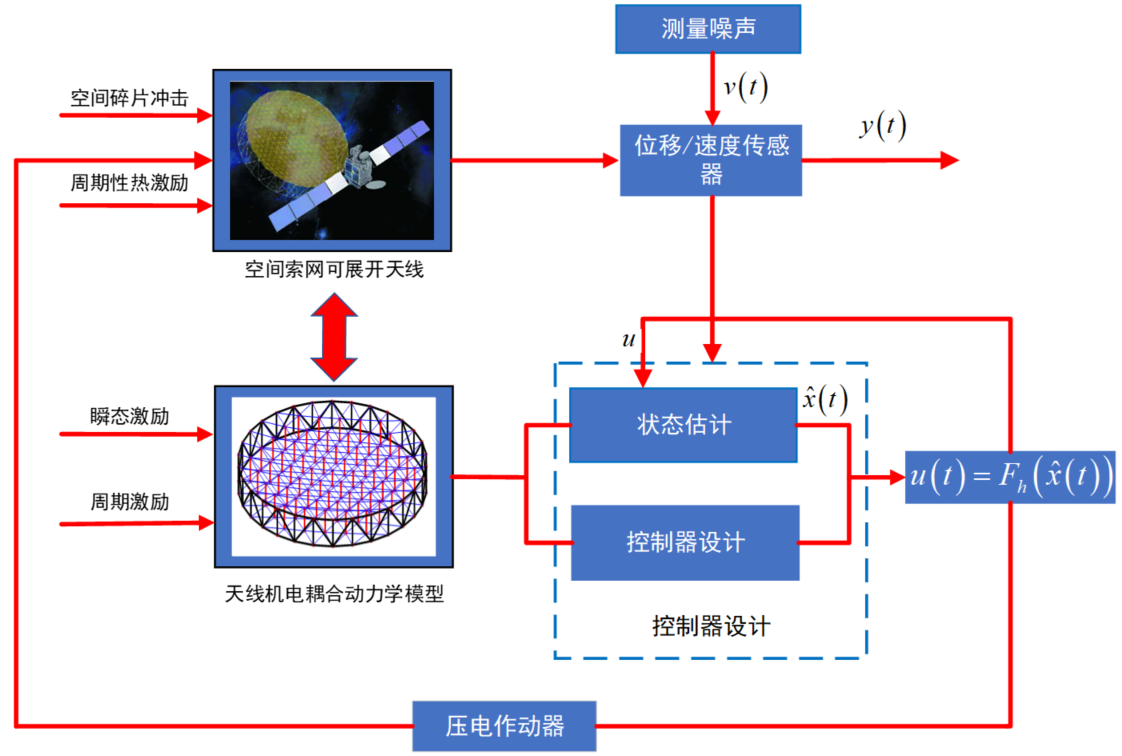
空间索网式可展开天线在受到环境中外界扰动后会产生长时间形面振动,进而影响到工作形面精度和工作性能。针对空间索网可展开天线结构振动问题,首先基于有限元法建立了空间索网可展开天线机电耦合动力学模型,随后建立状态空间形式的结构动力学方程,考虑模型不确定性与外界扰动。基于模型预测控制,以及齐次系统有限时间控制理论设计控制器,最终实现空间索网天线主动振动抑制控制。