


基本信息

副教授,博士生导师
机器人工程系主任
机器人智能制造研究中心主任
招生和联系方式
- 硕士招生:控制理论与控制工程/电子信息
- 博士招生:控制理论与控制工程
- 电子邮箱:yongkuiliu@163.com
- 办公地点:北校区新科技楼A301
- 招生说明:本课题组是一个以人工智能(强化学习、机器学习、深度学习等)为主要理论工具、以工业机器人为对象、以工业自动化/智能制造为背景的一个研究小组,欢迎感兴趣的同学报考。
招生
本课题组在理论、技术、硬件、软件等方面具有很好的积累:
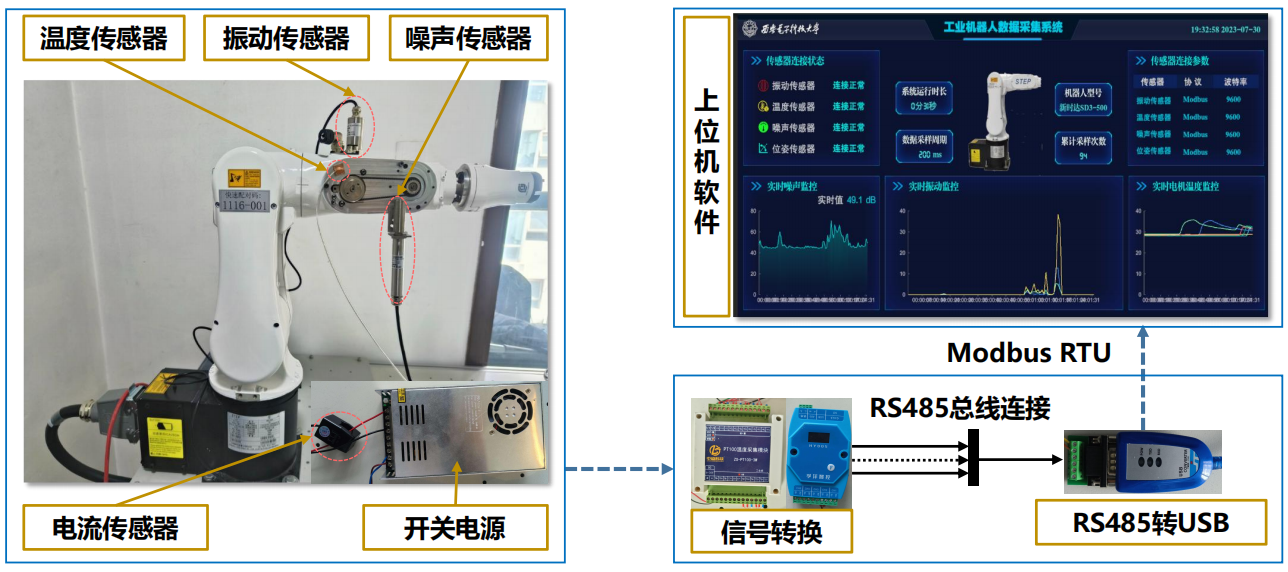
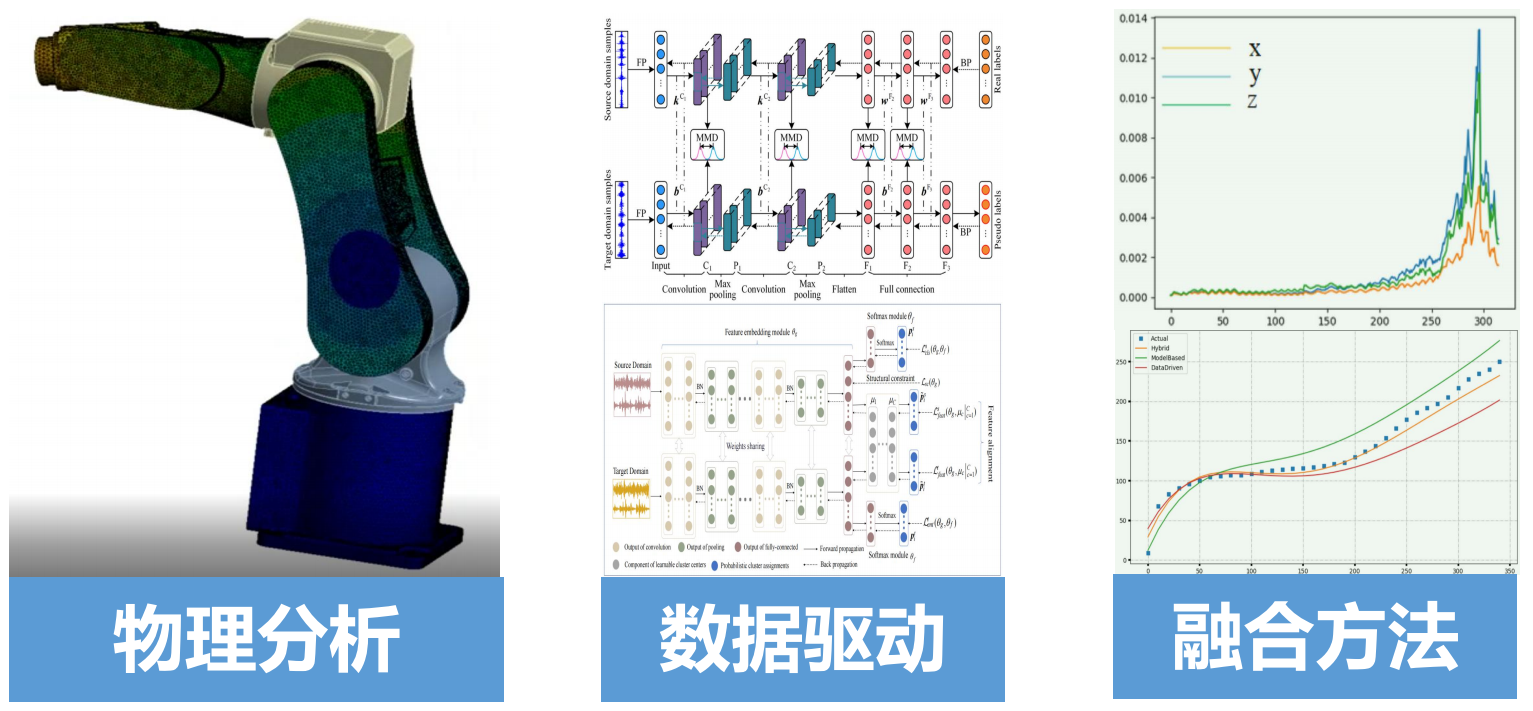
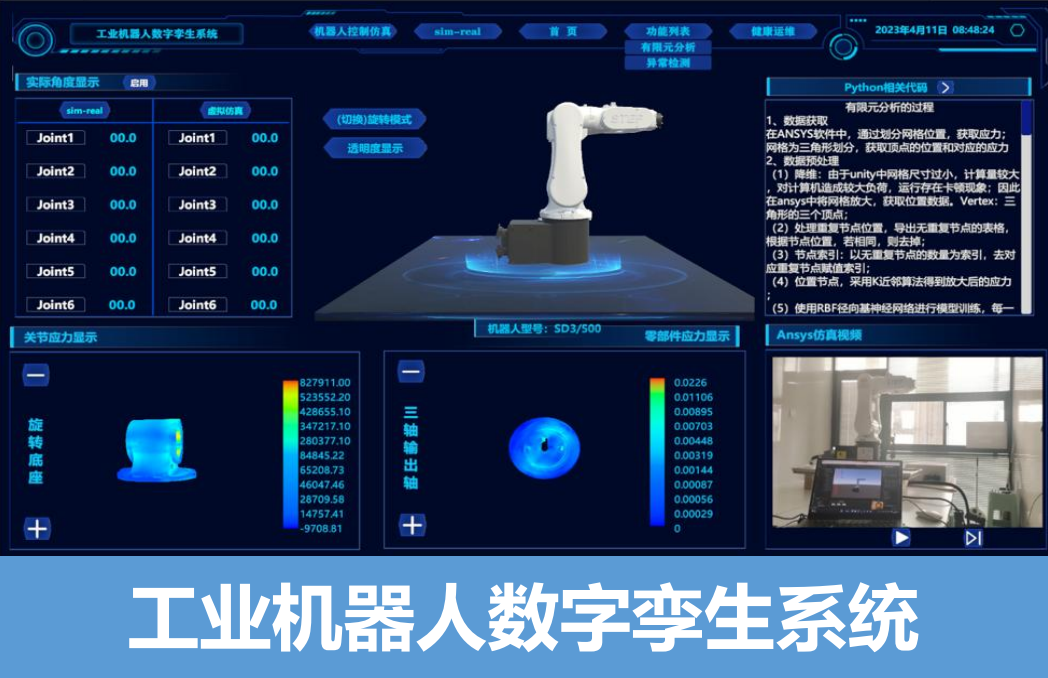
- 理论和技术方面,近5年来发表高水平论文40余篇,申请了相应的专利和软著,开发了基于Anylogic的云制造云边协同调度系统、基于深度强化学习和多模态人机交互的工业机器人高精度数字孪生轴孔装配系统、工业机器人装配产线数字孪生系统、工业机器人调度仿真和智能监控系统、智能工厂产线数字孪生系统等;
- 硬件方面,购置有高性能电脑、云服务器、2 台 UR5 协作机器人、 2 台新时达 SD3/500 机器人、2 个 Onrobot 6-轴力/扭矩传感器、4 台 Dobot 机器人,1台微软HoloLens2、2个ZOOMEDU 工业相机、3 台 RealSense 深度相机、2 台 Kinect2.0 体感器,以及一系列温度、振动、姿态、应力等传感器;1条工业机器人装配产线(含PLC、运动控制模块、HMI和机器人控制系统等),以及若干面向数字孪生开发的各类软件,如Unity 3D、VUP软件、工业机器人模型库、Anylogic仿真软件等。这些积累能够为研究生提供较好的科研实验条件;


- 课题组与国内外众多高校、科研院所有着广泛深入的合作,并邀请国际智能制造/工业互联网/机器人领域的著名专家包括北京航空航天大学张霖教授、新西兰奥克兰大学Xun Xu教授、瑞典皇家理工学院Lihui Wang教授担任顾问,参与课题组研究生指导,提高研究生的学术、科研水平和国际化视野;
- 本人倡导“团结、紧张、有序、活泼”的科研氛围,与研究生亦师亦友,课题组气氛融洽;
- 课题组研究方向面向学科前沿、面向产业发展、面向国家重大战略需求,重视研究生创新能力和工程意识培养、重视科研成果落地应用,致力于为相关产业发展做贡献。
工作经历
- 2014.07至今 西安电子科技大学 机电工程学院自动控制系 副教授
- 2013.12-2014.07 西安电子科技大学 机电工程学院自动控制系 讲师
- 2017.05-2018.05 瑞典皇家理工学院 工业工程和管理学院生产工程系 博士后
- 2015.03-2017.03 新西兰奥克兰大学 工程学院机械工程系 博士后
- 2011.09-2013.12 北京航空航天大学 自动化学院 博士后
研究方向
- 具身智能工业机器人
- 数字孪生工业机器人
- 机器人灵巧手
- 云制造
学术兼职
- 国际期刊Embodied Intelligence and Robotics(具身智能和机器人学)编委,2025.01.06-2027.01.06
- 博士论文获评2011年度西安电子科技大学优秀博士学位论文
- 中国仿真学会第三届智能物联系统建模与仿真专业委员会委员
- 中国仿真学会第四届国际交流工作委员会委员
- 国家工业信息安全发展研究中心制造业数字化仿真标准工作组(TC573/WG17)特聘专家
- 工业和信息化部教育与考试中心专家库专家
- 中国人工智能学会第四届智能制造专业委员会委员
- 中国自动化学会3D打印与社会制造专业委员会(筹)委员
- 中国图学学会第八届数字孪生专业委员会委员
- 国际期刊International Journal of Modeling, Simulation, and Scientific Computing编委
- 国际期刊Frontiers in Manufacturing Technology副编辑
- 国际期刊Robotics and Computer-Integrated Manufacturing客座编辑
- 国际期刊Digital Manufacturing Technology编委
- 国际期刊Artificial Intelligence and Applications编委
- 中国仿真学会、中国自动化学会、中国人工智能学会、中国计算机学会、IEEE、ASME等组织的会员
- 国家自然科学基金青年、面上以及一系列其他科技项目的评审专家
- 共发表学术论文近60篇,在Google Scholar中总被引3598次(截止到2023年7月1日)
- 以第1客座编辑的身份在国际期刊Robotics and Computer-Integrated Manufacturing(中科院1区)上分别以“Industrial Internet for Manufacturing”和“Smart Robotics for Manufacturing”为主题组织专刊2次
- 连续3次受邀在“IEEE工业电子协会”的旗舰会议“IEEE International Conference on Industrial Informatics”上组织智能制造专题
- 合作出版云制造英文专著:Lin Zhang, Yongkui Liu, Service Management and Scheduling in Cloud Manufacturing, Publisher: De Gruyter (18 July 2022), 444 pages
科教项目
- 中国信息通信研究院智能装备数字孪生技术创新与测试工业和信息化部重点实验室2024年开放课题,“基于模仿学习的机械臂柔性装配模型研究”,2025.01-2025.12,主持,在研
- 国家自然科学基金面上项目,“基于深度强化学习的云制造调度问题研究”,58万,2020.01 - 2023.12,主持,在研
- 教育部产学合作协同育人项目,西安电子科技大学-上海节卡机器人科技有限公司,“面向人机协作的《传感器原理与应用》课程教学内容改革”,5万,2022.10-2024.10,主持,在研
- 中国航天科工二院二部复杂产品智能制造系统技术国家重点实验室开放研究基金课题,“云制造环境下虚实结合的工业机器人训练方法”和“基于模仿学习的机械臂智能运动控制研究”,80万,2019.07 - 2021.06,主持,在研
- 国家重点研发计划项目“基于开放架构的云制造关键技术与平台研发”外协,“工业机器人自主抓取算法及监控系统开发”,15万,2020.05 - 2022.05,主持,在研
- 宁波市科技局机器人与高端装备重大专项,“智能工厂智能引擎研发”,100万,2019.11 - 2021.11,课题负责人,主持,在研
- 工信部项目,“工业云平台调度管理仿真APP开发”,20万,2019.07 - 2020.07,主持,在研
- 国家重点研发计划项目“复杂产品建模与仿真系统”外协,“海量语义信息动态采集模块开发”,16.29万,2020.10-2022.10,主持,在研
- 工业云制造(四川)创新中心咨询项目,“云制造技术”,10万,2020.11-2022.11,主持,在研
- 2020年西安电子科技大学基本科研业务费创新创业专项重点项目,“融合智能机器人的传感器课程创新创业教育方法研究和探索”,2万,2020.03-2021.01,主持,已结题
- 2021年机电院“三全育人”综合改革专项研究课题,“机器人工程卓越班专业班主任制度运行机制及实践研究”,0.8万,2021.07-2022.06,主持,在研
- 国家自然科学基金青年项目,“面向任务的网络公用品博弈群体协调和合作机制研究”,24万,2013.01 - 2015.12,主持,已结题
- 中国博士后科学基金第六批特别资助,2013.06 - 2017.04,15万,主持,已结题
- 第52批中国博士后科学基金面上资助,2012.06 - 2017.04,5万,主持,已结题
- 中国博士后国际交流计划派出项目,2015.03 - 2017.03,30万,主持,已结题
荣誉奖励
- 论文《云制造再探讨》获评2022年度中国机械工程学会优秀论文;
- 指导本科生在中文核心期刊《系统仿真学报》发表论文“基于深度强化学习的机器人轴孔装配策略仿真研究”;
- 指导本科生在“2023机器人与软件工程前沿国际会议”上发表论文“Architecture and Implementation of High-fidelity Digital Twins for Industrial Robots”;
- 指导毕业设计获西安电子科技大学自动化专业本科优秀毕业设计2次(2017级和2019级),获陕西省自动化学会优秀毕业设计大赛特等奖3次,1等奖3次,获评优秀指导教师8次;
- 西安电子科技大学海棠8号书院“雪球计划”指导11名学生全部保研名校,其中4名保研西电,7名学生保研清华、西交、中科大等,并获“优秀指导教师”称号;
- 获评西安电子科技大学优秀本科生导学团队指导教师,并获学校公开表彰;
- 指导本科生获得2022RoboCom 机器人开发者大赛乒乓乐扣国赛二等奖、计算机设计大赛西北赛区二等奖等;
- 担任西安电子科技大学第一届机器人工程卓越班班主任,带领该班取得良好成绩,竞赛获奖比例超过60%。
新闻报道
- 2023每日经济新闻、凤凰网等:工业云制造平台为何落地难?专家:面临工业场景复杂、盈利模式尚未形成等问题,http://www.myzaker.com/article/647ded34b15ec03ed5520ff0;https://news.ifeng.com/c/8QNSPsX21Vz
- 2023第三届中国仿真技术产业高峰论坛暨成都(温江)数字化创新峰会成功举办,https://www.sohu.com/a/678497199_120175719
- 2023机器人与软件工程前沿国际会议,https://www.scholat.com/vpost.html?pid=206854
- 2023机器人与软件工程前沿国际会议(FRSE 2023)在长沙顺利召开,https://www.sohu.com/a/687570222_121626208
- 2023第六届全国现代制造集成技术学术会议“人机交互与智能管控”专题论坛报告,https://mp.weixin.qq.com/s/oSh0Okh4SRlyyXN49IYcZg
- 2023第六届全国现代制造集成技术学术会议精彩内容回顾(专题论坛三:人机交互与智能管控),https://mp.weixin.qq.com/s/NuKMmDCoHtncjREGpkFwTg
- 2022年度100篇!中国机械工程学会2022年优秀论文遴选结果,《云制造再探讨》(序号32),https://mp.weixin.qq.com/s/unb1B1Q17FCVtSw8n8lHVw
- 2021人民咨询:云边协同的智能制造系统,https://baijiahao.baidu.com/s?id=1715284795588695271&wfr=spider&for=pc
- 2019河海大学机器人与智能制造技术国际会议召开,https://www.caigou.com.cn/news/2019100814.shtml
- 2018服务型制造与创新论坛在武汉成功召开,http://qikan.cmes.org/CN/news/news66.shtml
- 2018【专家论坛】刘永奎副教授《云制造及相关关键问题探讨》报告PPT及视频全分享,https://www.sohu.com/a/283796805_120056516
最新进展
- [比赛]课题组作品“数字孪生驱动的机器人深度强化学习装配系统”获得“申昊杯”第六届中国研究生机器人创新设计大赛三等奖 https://mp.weixin.qq.com/s/UkVAyxVvIeBQBr7bq_0y6A
- [比赛]课题组作品“基于数字孪生的工业机器人智能运维系统”获得“申昊杯”第六届中国研究生机器人创新设计大赛三等奖 https://mp.weixin.qq.com/s/UkVAyxVvIeBQBr7bq_0y6A
- [比赛]课题组作品获得第二十六届中国机器人及人工智能大赛全国决赛一等奖,2024-08-28
- [比赛]课题组作品获得第二十六届中国机器人及人工智能大赛全国决赛二等奖,2024-08-28
- [比赛] 课题组作品“基于深度强化学习的高精度机器人装配系统”入围“申昊杯”第五届中国研究生机器人创新设计大赛全国总决赛,获三等奖,https://mp.weixin.qq.com/s/KE32W6xk3874USfkOgD8EA,2023-08-23
- [比赛] “基于深度强化学习的机器人柔顺轴孔装配策略研究”,2023年陕西省第十六届自动化类专业本科优秀毕业设计(论文)大赛特等奖,2023-07-25
- [比赛] “工业机器人高保真数字孪生系统开发及其智能监控方法研究”,2023年陕西省第十六届自动化类专业本科优秀毕业设计(论文)大赛特等奖,2023-07-25
- [比赛] 课题组作品“工业机器人高保真数字孪生”,第二十五届中国机器人及人工智能大赛陕西赛区三等奖,2023-05-30
- [毕设] “基于深度强化学习的机器人柔顺轴孔装配”,西安电子科技大学2019级校级优秀本科毕业设计(论文)(西电自动化专业唯一),2023-06
- [论文] Yongkui Liu, Qing Zhao, Jianyong Feng, Chunfu Zhong and Lin Zhang, Digital twin for a robot assembly line: architecture and implementation, International Journal of Modeling, Simulation, and Scientific Computing, (2023) 2341034 (21 pages)
- [论文] 本科生撰写的论文在线发表:朱子璐,刘永奎,张霖,王力翚,林廷宇, 基于深度强化学习的机器人轴孔装配策略仿真研究, 系统仿真学报, DOI:10.16182/j.issn1004731x.joss.23-0518, 2023-07-20.
- [论文] Yongkui Liu, Xinyu Wang, Kang Yang, Yaduo Pan, Qianji Wang, Architecture and Implementation of High-fidelity Digital Twins for Industrial Robots, International Conference on The Frontiers of Robotics and Software Engineering, Changsha, China, Jun.16-18, 2023;
- [论文] Yongkui Liu, Yaoyao Ping, Lin Zhang, Lihui Wang, Xun Xu, Scheduling of decentralized robot services in cloud manufacturing with deep reinforcement learning, Robotics and Computer–Integrated Manufacturing(中科院1区期刊), 80 (2023) 102454;
- [论文] Yaoyao Ping,Yongkui Liu,Lin Zhang,Lihui Wang,Xun Xu,Sequence generation for multi-task scheduling in cloud manufacturing with deep reinforcement learning, Journal of Manufacturing Systems(中科院1区期刊), 67 (2023) 315–337;
- [论文] Yaoyao Ping,Yongkui Liu,Lin Zhang,Lihui Wang,Xun Xu, Deep Reinforcement Learning Based Multi-Task Scheduling in Cloud Manufacturing Under Different Task Arrival Modes, Journal of Manufacturing Science and Engineering(美国机械工程师学会会刊), 2023, 145: 081003;
- [论文] Yongkui Liu, He Xu, Ding Liu, Lihui Wang, A digital twin-based sim-to-real transfer for deep reinforcement learning-enabled industrial robot grasping, Robotics and Computer–Integrated Manufacturing(中科院1区期刊), 78 (2022) 102365;