机器人技术
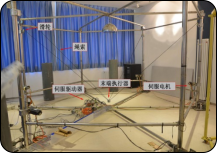
| 索牵引并联机器人 | 竖直平面四索牵引并联机器人 |
| 索牵引并联机器人具有运动惯性小、工作空间大、响应速度快等优势,在大型射电望远镜、超大空间摄影摄像、康复机器人等领域发挥巨大作用。我们对空间大跨度索牵引机构的传递性能、振动控制及轨迹跟踪等问题进行深入研究。 | 搭建了平面四索牵引并联机器人实验样机,对全约束型索牵引机构工作特性进行研究。考虑到柔索只受拉不受压的特性,以及多索并联驱动直接影响末端执行器的工作姿态,可实现对末端执行器工作状态的精确控制。 |
|
柔索牵引机器人 控制系统界面 |
竖直平面内四索牵引并联机器人 VC控制系统界面 |


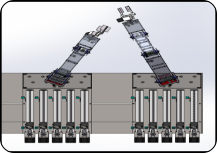
| 索牵引双臂机器人 | 双臂机器人 |
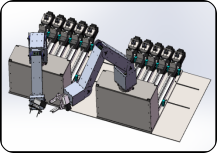
| 提出了索驱动串联机械臂设计方案,旨在采用索结构驱动关节运动以满足机械臂轻量化要求。研制了一种索牵引的双臂机器人,对其驱动索的解耦结构进行详细设计,进行运动学、动力学分析,运用双臂协调运动算法实现多种装配任务。 | 制作了实验样机对机构设计合理性,以及运动学/动力学分析,轨迹规划,控制算法等方面的理论研究进行验证。通过机器视觉定位三维空间中物体的位置并进行形态测量,进而控制双臂协同工作实现目标物体的抓取。 |
|
索牵引双臂机器人俯视图 索牵引双臂机器人轴侧视图 |
双臂机器人三维模型 双臂机器人实验验证 |


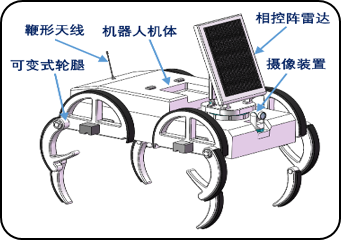
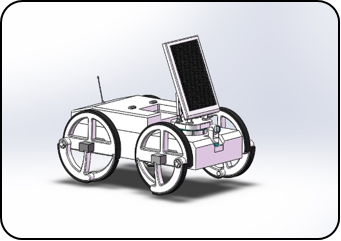
| 多足机器人 | 机器视觉 |
|
设计的多足机器人在复杂的任务环境中采用腿式结构步态行走运动,在较平坦的任务环境中,腿式结构变化为轮式结构,极大的提高运动速度。 |
通过深度相机获取物体在三维空间的位置和姿态,将图像处理与深度学习相结合,能更加方便有效的获取物体的位置,并且具有更强的鲁棒性。 |
|
腿式行走状态 轮式滚动状态 |
目标识别 三维点云 |

可展开天线
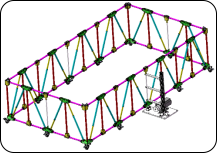
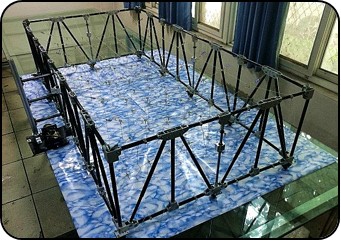
| 薄膜天线的动力学分析 | 桁架-索膜柱面可展开天线 |
| 建立了伞状薄膜可展开天线的有限元模型,对天线展开过程、膜面精度进行理论分析和仿真研究。同时研制了伞状薄膜可展开天线原理样机,对分析结果进行实验验证。 | 提出一种桁架-索膜结构可展开柱面天线设计方案,并对天线中索膜结构进行形态设计,同时研制原理样机进行设计方案初步验证。 |
|
薄膜天线摄影测量图 薄膜动力学仿真图 |
方形可展开桁架三维模型 桁架-索膜柱面天线原理样机 |

.png)