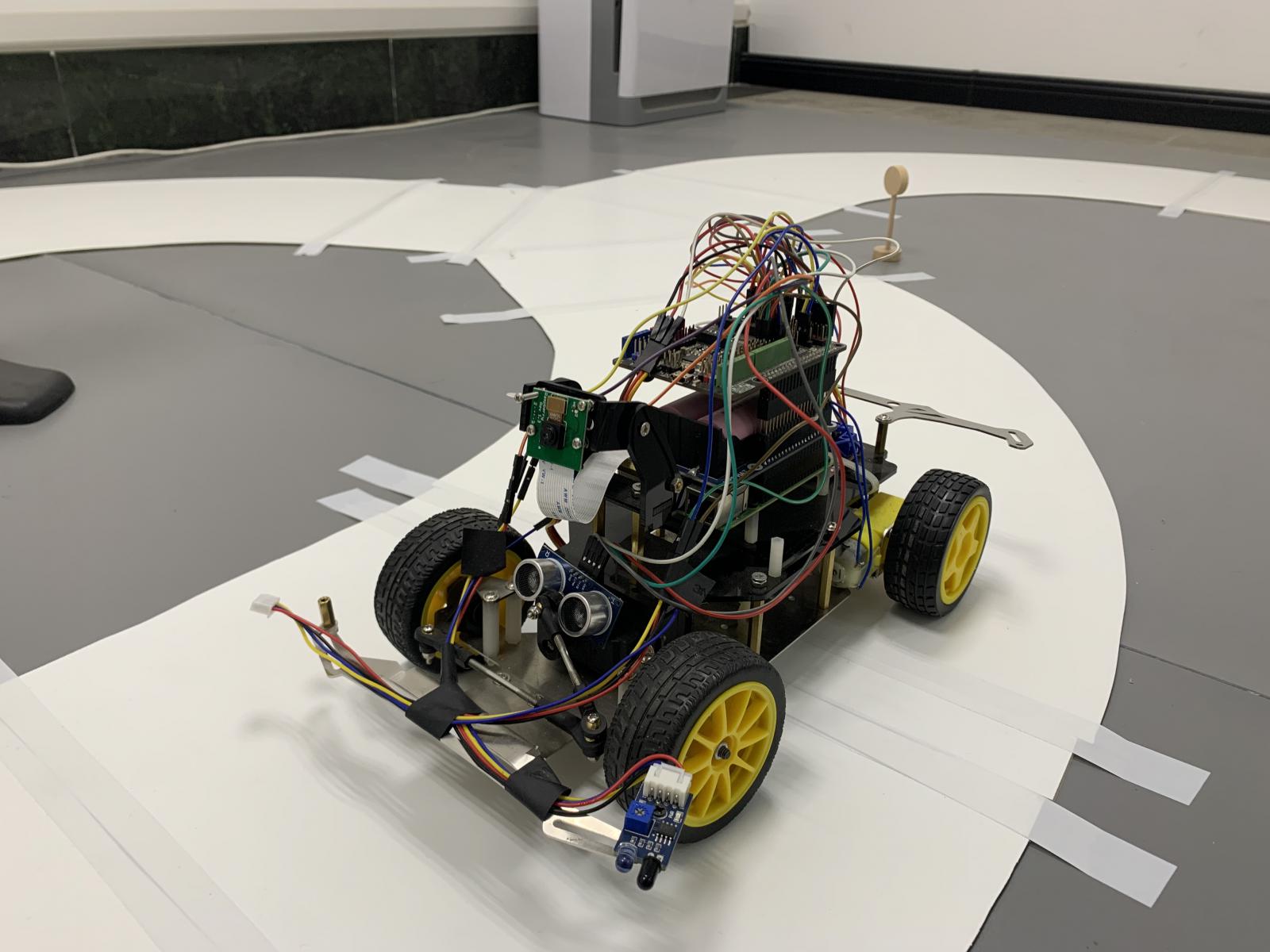
实验室车路协同平台如图所示,赛道呈回字形,包含交叉路口,拥有搭载树莓派、Nvidia Jetson nao的智能小车数台,小车搭载的传感器包括大疆Livox mid-70激光雷达、1080p相机、超声波传感器与红外传感器等。该平台可验证自动驾驶中的感知、决策、规划功能、实现车路协同中的基于V2X的超视距验证、多车协同作业功能。
超视距演示视频: https://yunpan.360.cn/surl_y6g9N5akusf


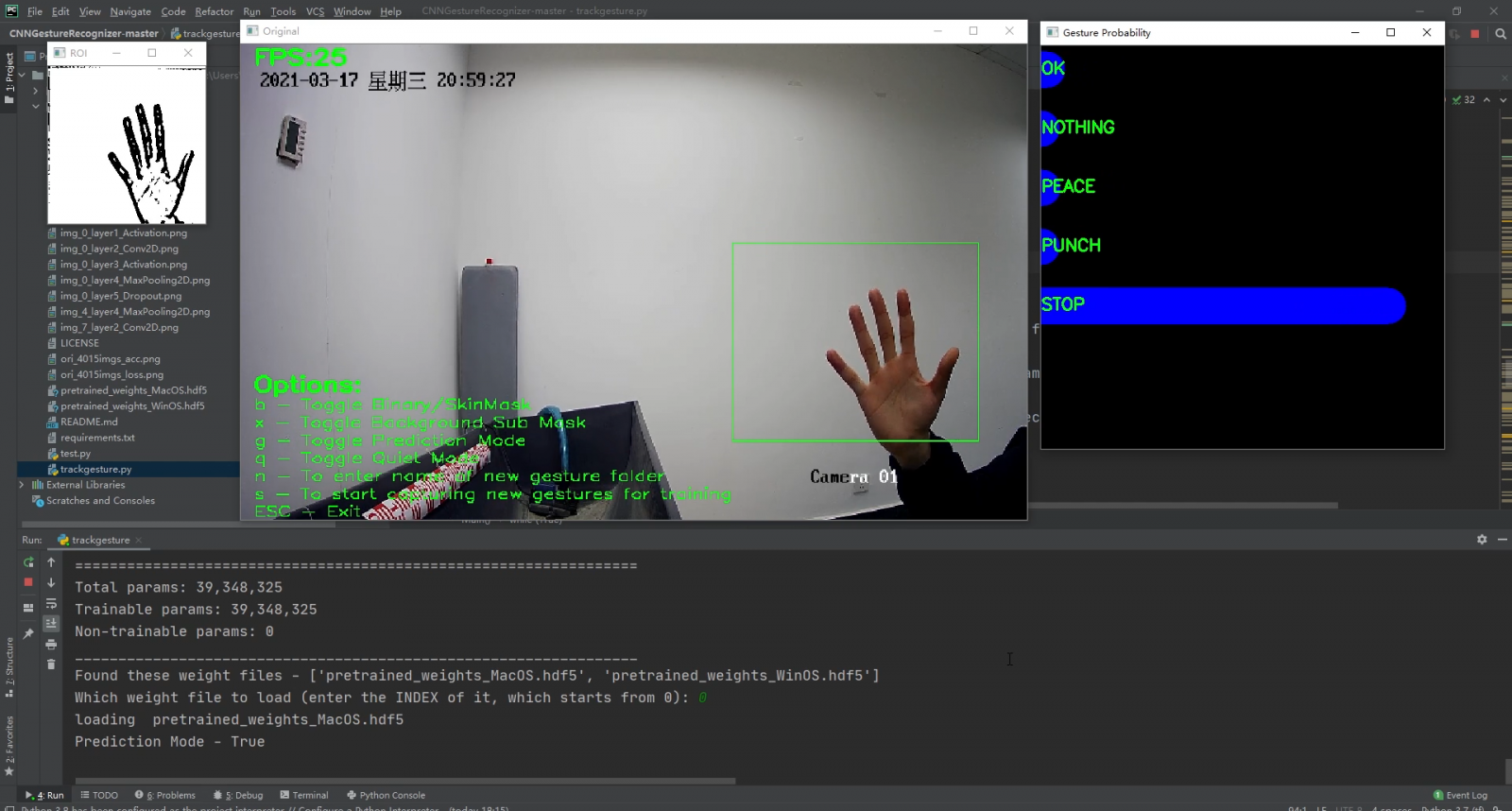
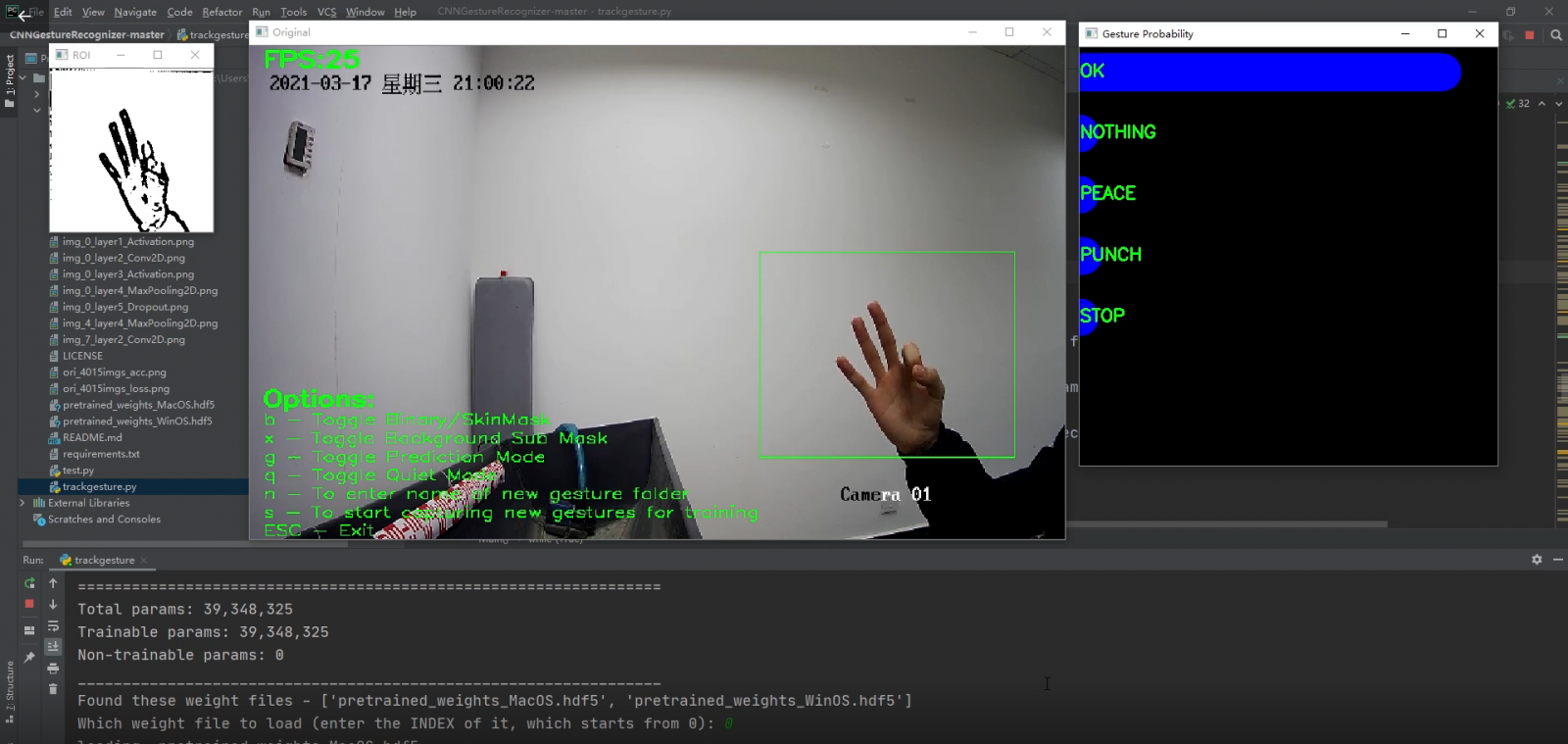
手势识别
这是一个简单的通过模式识别的方法进行手势识别的样例。首先将摄像头采集到的图像进行滤波和平滑等预处理,去除图象中的噪声。而后根据肤色提取手势轮廓,并对图像进行形态学处理。而后提取手势轮廓,计算轮廓的多种特征,提取轮廓的有效特征向量,对手掌和指尖等进行定位。最终确定手势。

翻斗车识别
采集了不同场景下不同型号、不同角度的翻斗车图片,结合翻斗车模型的图像作为数据集,并对图像当中的翻斗车进行标注。用SSD模型基于在公开数据集上预训练得到的权重训练了一个单分类网络,这个网络可以检测到图像中的翻斗车。



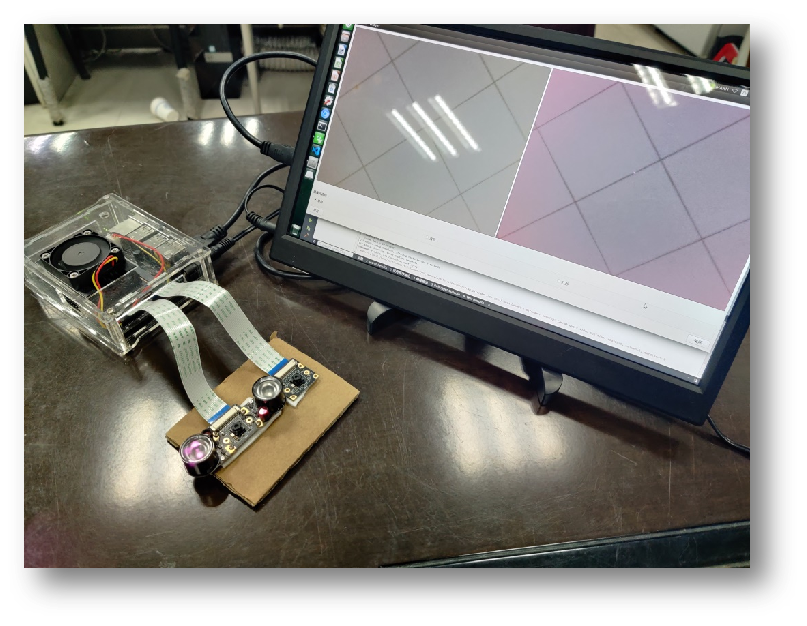
板子:Jetson Nano
摄像头:普通单目摄像头*1 红外摄像头*1
连接方式:均通过CSI接口与Jetson nano进行连接
主要功能以及流程:当单击开始采集按钮后,jetson nano会同时打开两个摄像头并同时进行图像采集,将采集后的结果进行相关的滤波后会在界面上进行输出

EdgeGallery实验平台
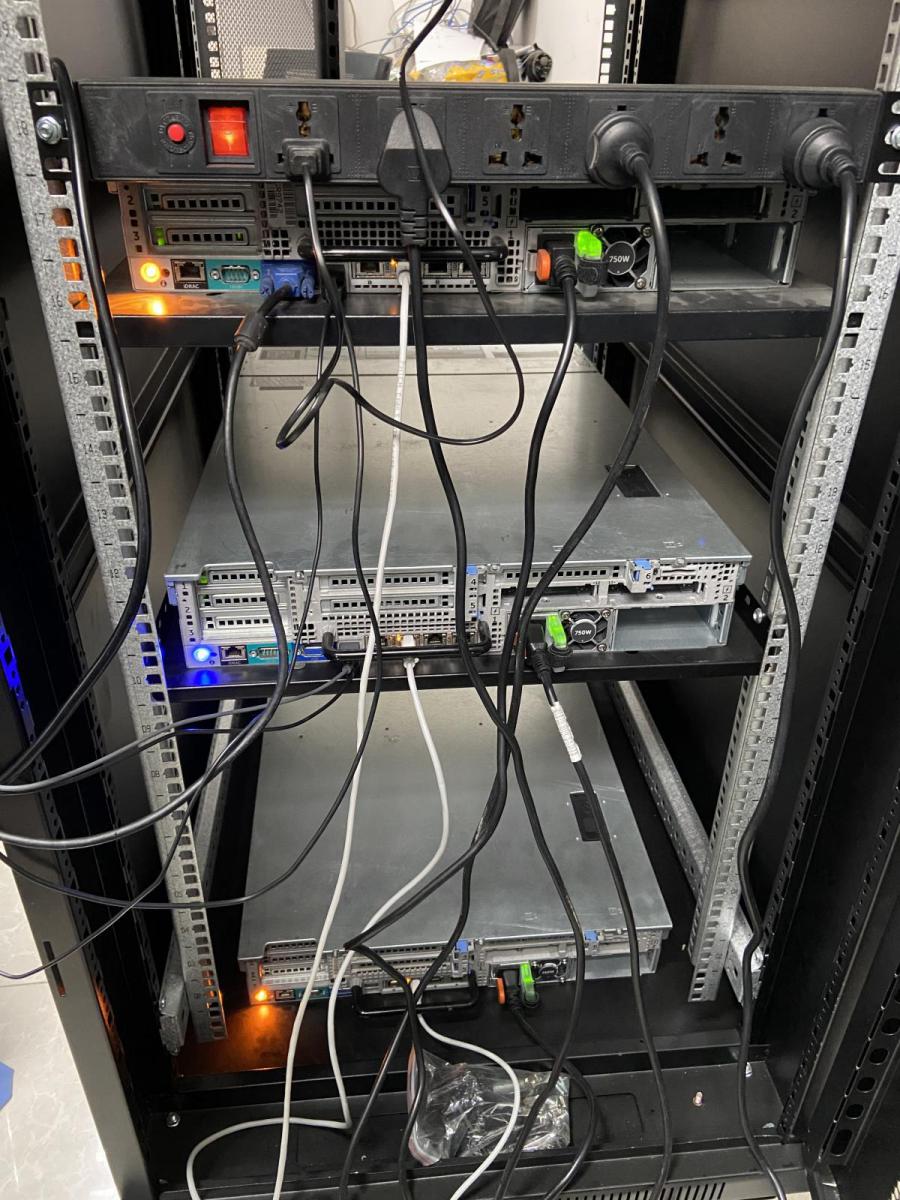
EdgeGallery实验部署于三台刀片服务器

EdgeGallery硬件演示平台及EdgeGallery开发者页面
EdgeGallery硬件演示平台及EdgeGallery开发者页面,当前页面显示已经集成在EdgeGallery的应用,例如常见的ansible,jenkins等
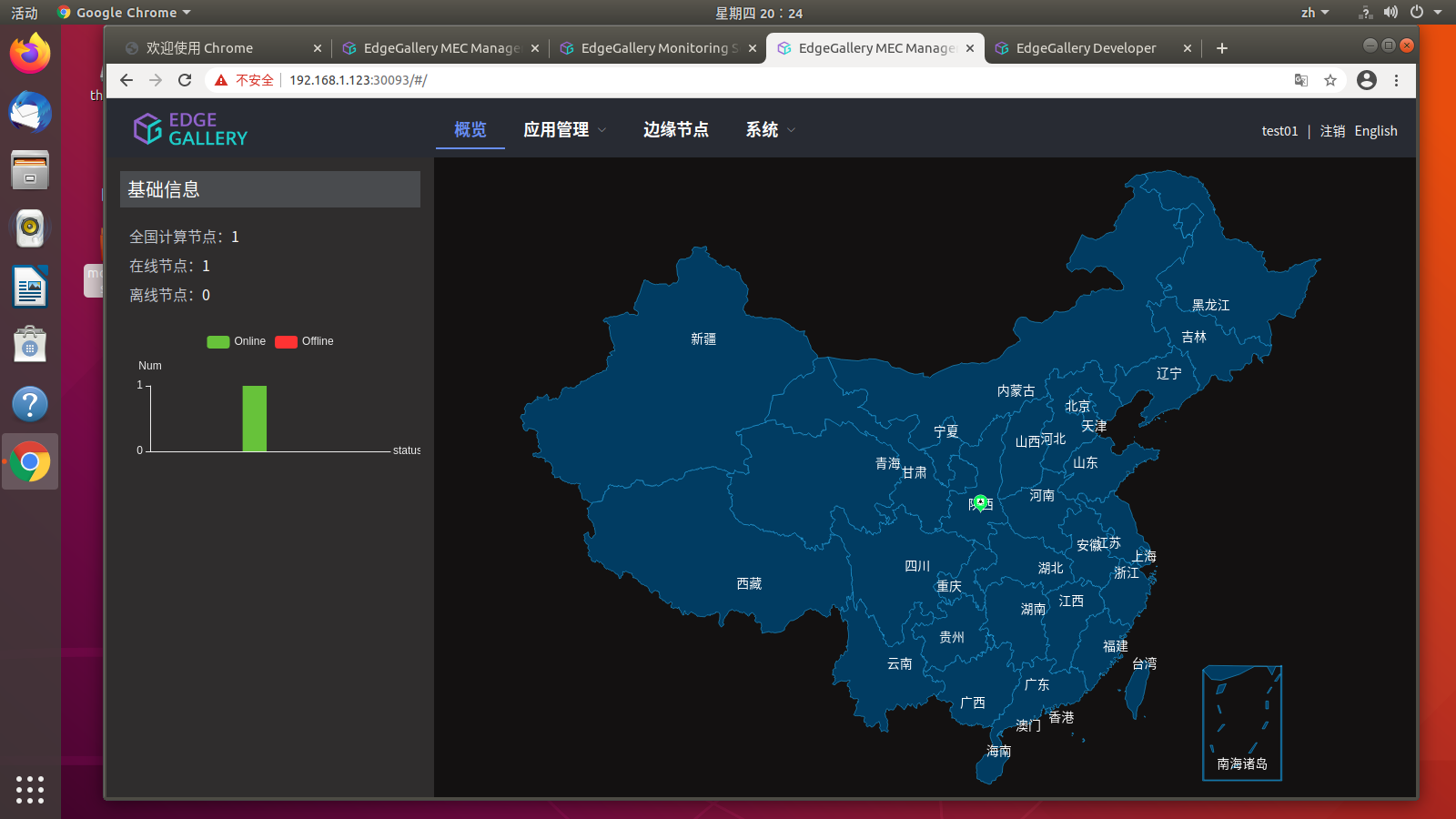
MECM的概览页面(实时显示全国分布的边缘节点信息)
MECM的概览页面,实时显示全国分布的边缘节点信息,所有节点分为三类:计算节点,在线节点,离线节点每个节点有两种状态,online,offline
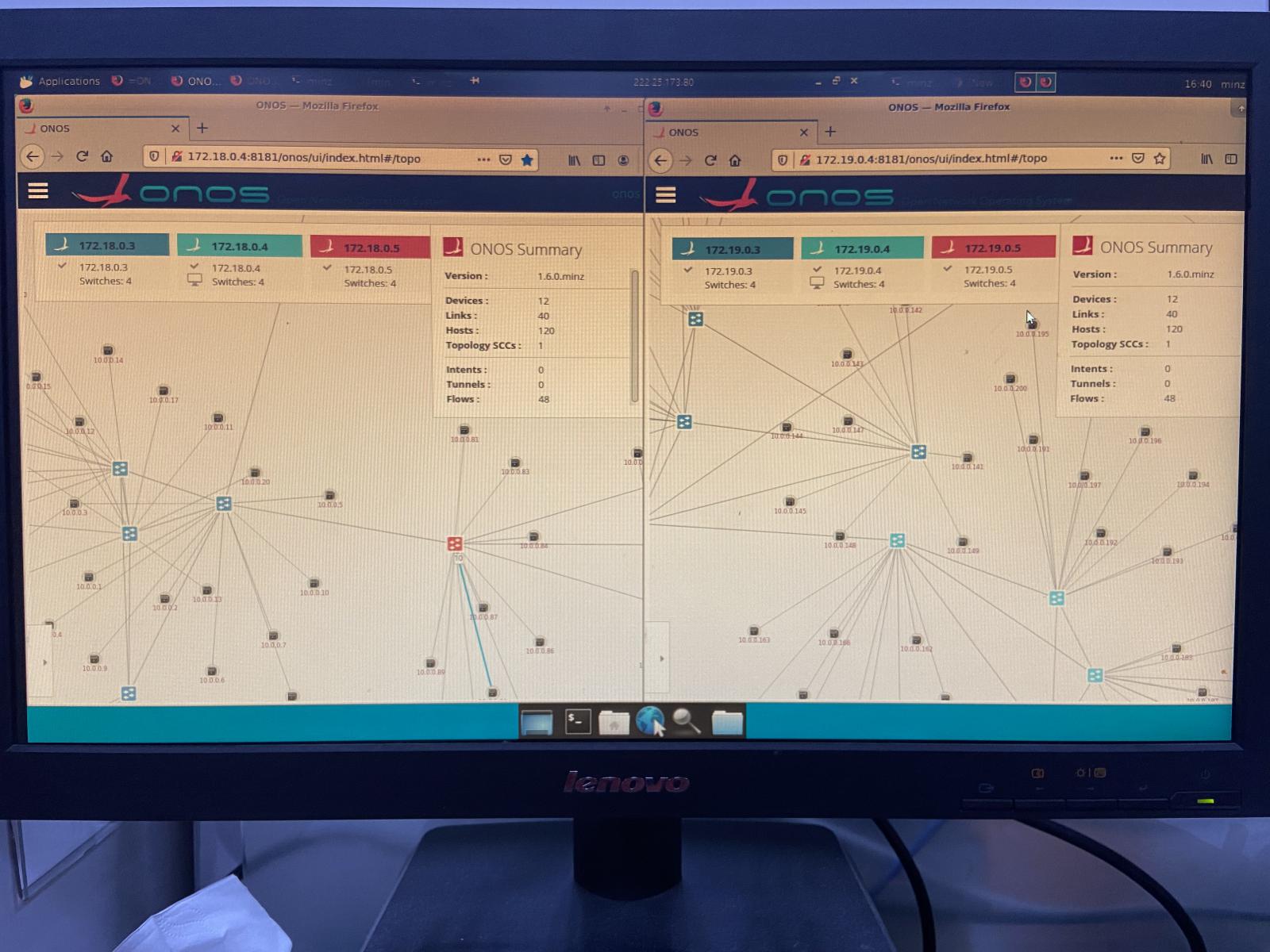
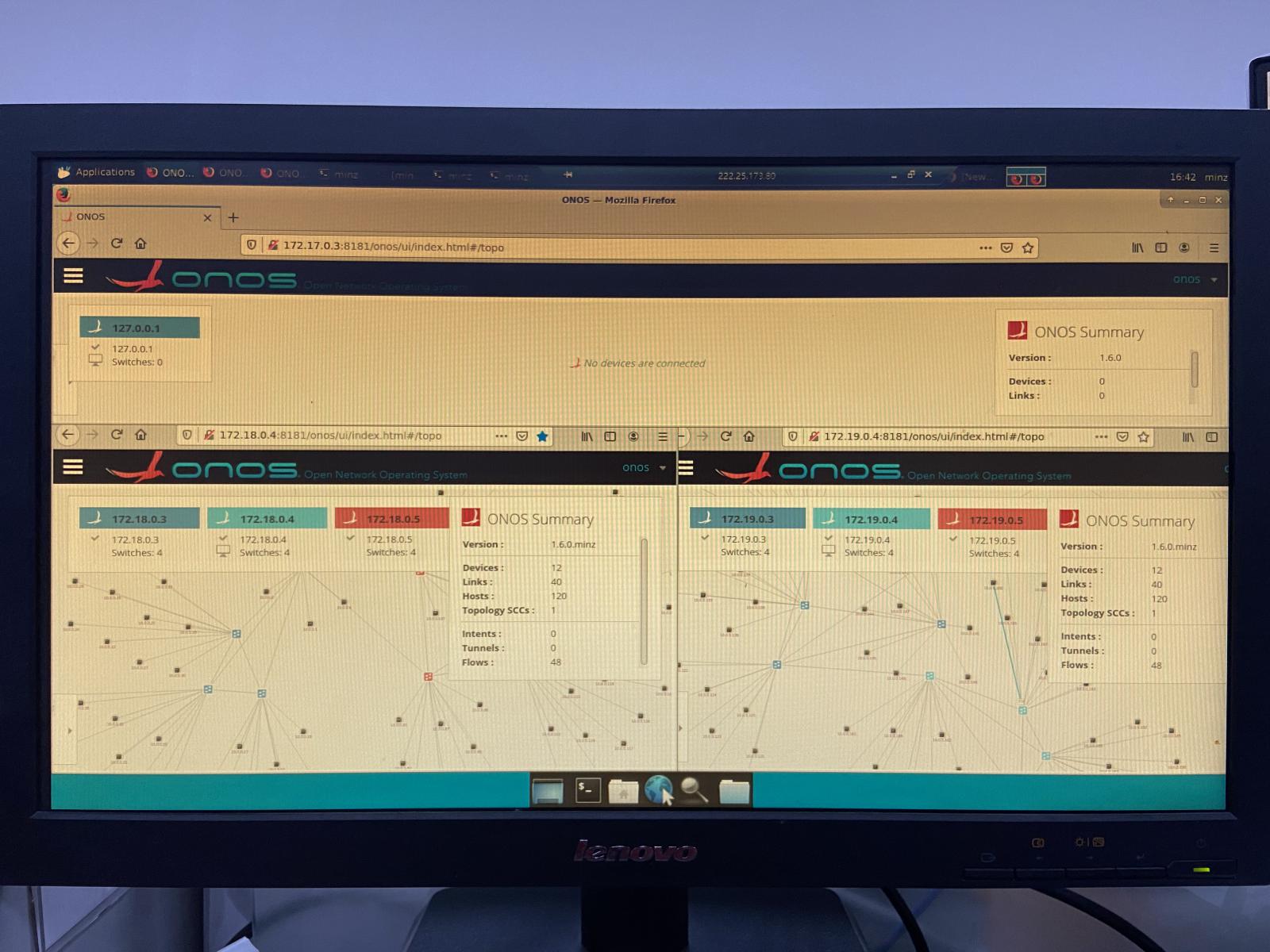
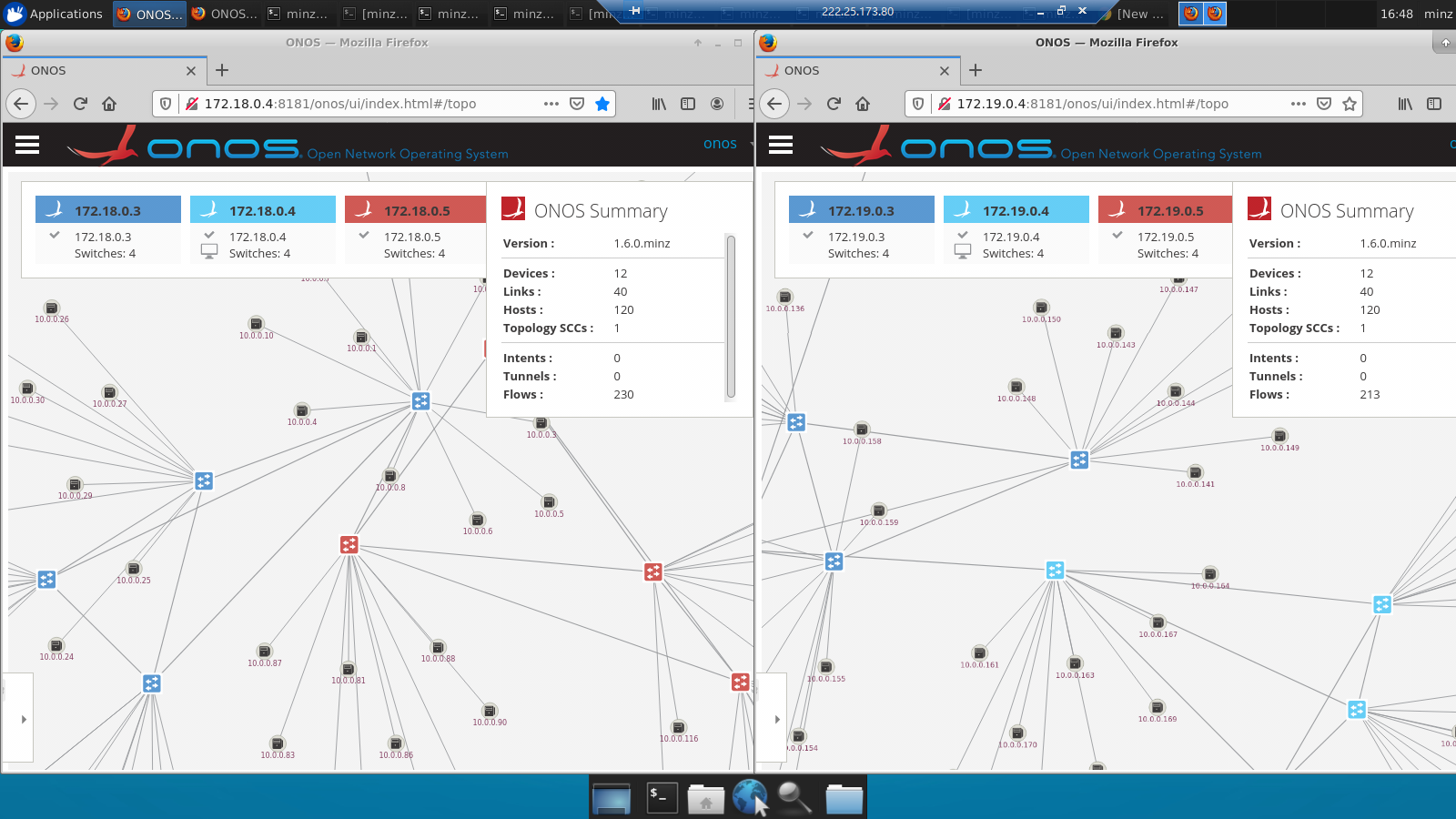
空天一体化网络——分层分级onos的拓扑图